Ideas & Motion Srl |
| Email: | riccardo.groppo@ideasandmotion.com |
| Internet: | http://www.ideasandmotion.com/ |
Similar projects |
| System integration projects |
The HYPER_SDF project will propose an open powerful automotive development platform based on the proper combination of diverse high-performance multi-core processors, providing outstanding processing capabilities while featuring a state-of-the-art safety architecture.

HYPER_SDF is mainly a computational platform addressing future ADAS applications in the field of Active Safety, capable to perform sensor fusion and implement complex strategies for the autonomous control the vehicle.
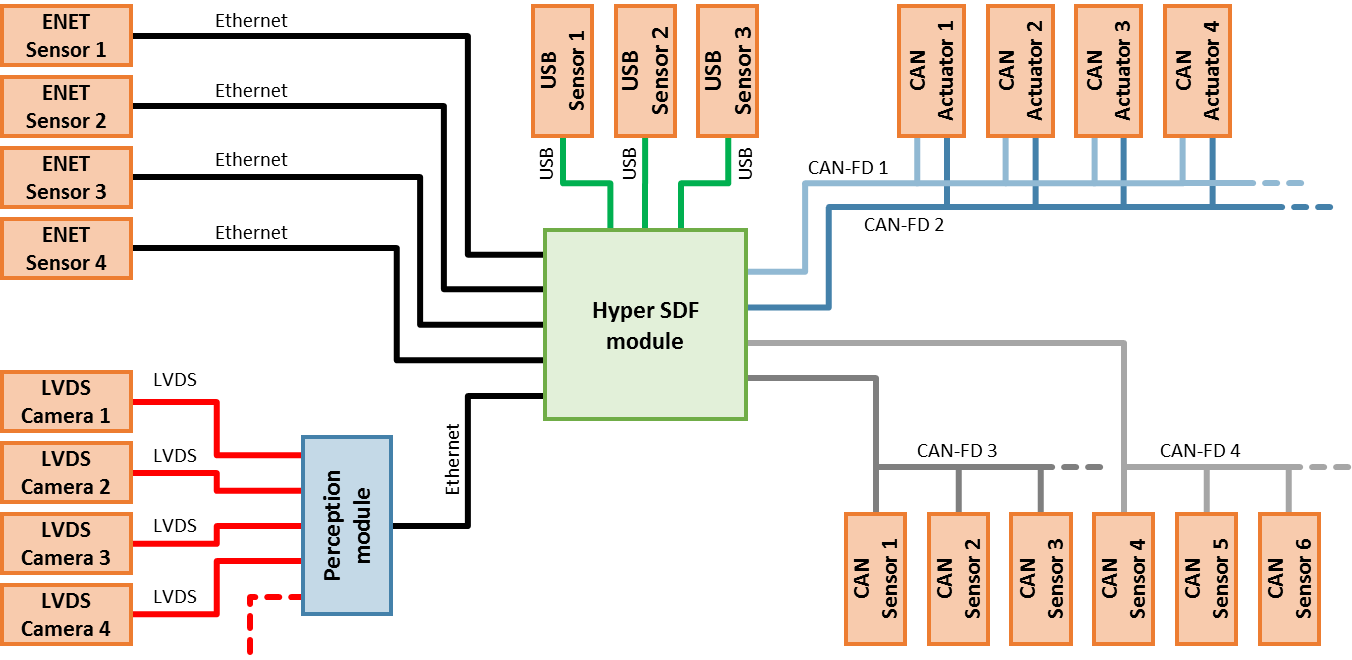
The HYPER_SDF is interconnected to the rest of the vehicle E/E system and to the ADAS sensors via different communication busses (CAN, Ethernet, LIN …), but with limited discrete Input/Output capabilities.
The HW architecture of HyperSDF platform is based on a two-processors solution:
The adoption of a couple of HyperSDF ECUs running in parallel enables fail operational ADAS applications.
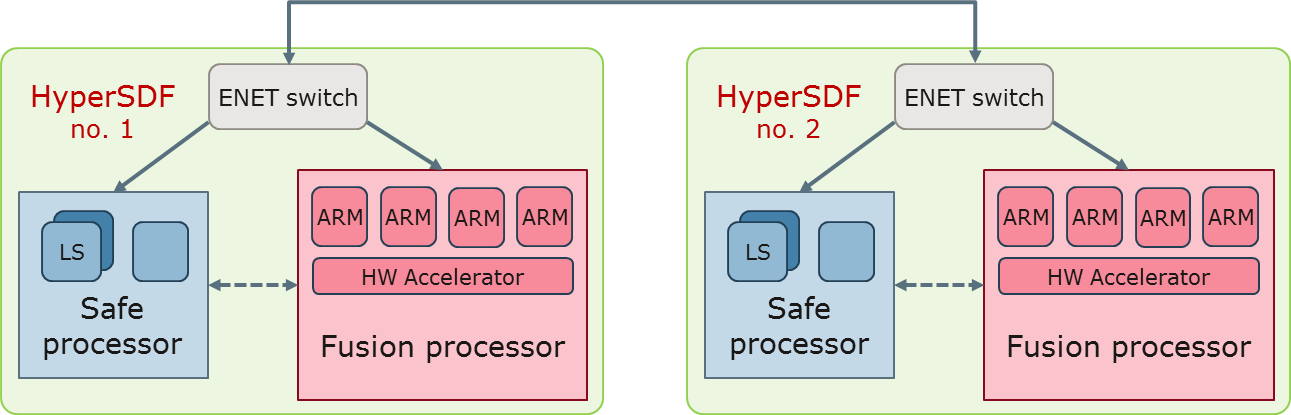
A single HYPER_SDF unit with two processors each may also address low/mid-end applications, being a fail silent system only. In this case a possible system architecture is shown in the following figure:
This project is an extension for the “Integrated and Open Development” platform by providing an advanced computing platform in order to continue validation of the complex algorithms up to realistic hardware. The HYPER_SDF will therefore supports experimental activity on automated vehicles, both as standalone platform for direct evaluation in lab or vehicle, and as extension of the IODP targeting to enhance the existing integrated vehicle development framework by realistic E/E platform.